
Controlador PI matlab-simulink
Publicado por Anderson (3 intervenciones) el 01/12/2016 04:40:33
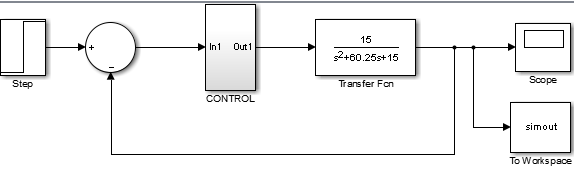
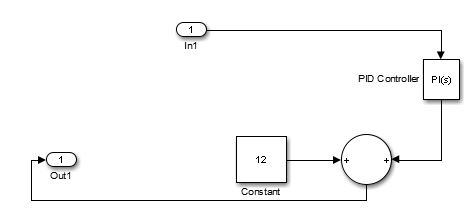
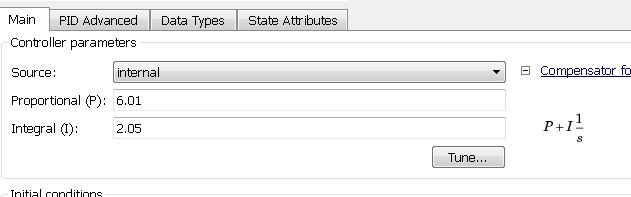
Buen dia gente, mi problema es que quiero llevar un lazo cerrado echo en simulink a matlab, el problema es que mi controlador, tiene una BIOS o mejor dicho una costante de valor 12 que le suma al controlador, al graficar en simulink, no me da la misma grafica que de Matlab, el siguiente es mi codigo en matlab y adjuntare imagenes de simulink y del controlador, lo que se, o tuve conocimientos es que el controlador maneja un error, que el error es el que es estabilizado o llegado a cero, pero implicitamente le entra al controlador, lo que en matlab no se el comando para ingresar dicho error, o algo parecido, ayuda urgente !!
Valora esta pregunta

0

