
YL-70, YL-73 Sensor funciona de forma erratica
Publicado por David (1 intervención) el 07/05/2020 21:34:07
Hola a Tod@s
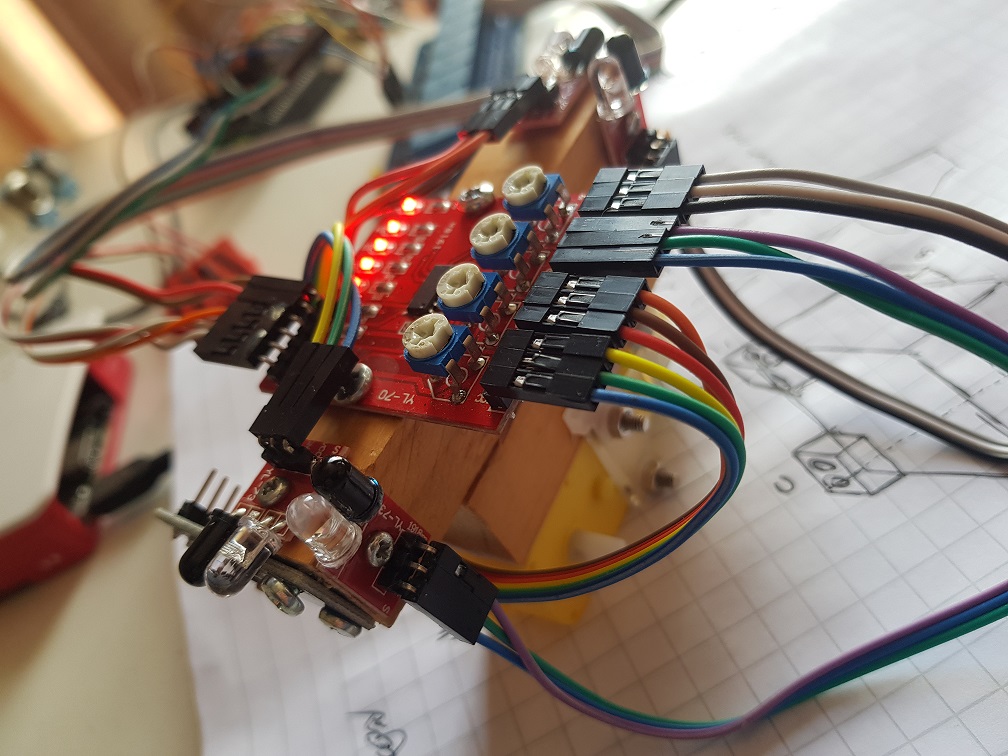
Les comento que estoy trabajando con un una placa ArduinoUNO (Sin Clock) y una placa YL-70 con 4und de sensores IR YL-73, el problema es que codifique la operacion y funciona correctamente pero de mañana esta placa aparece con todos los sensores activos, y ya de tarde-noche vuelve a operar correctamente, esto esta instalado en interior, no con exposicion directa a sol ni nada.
Me gustaria saber que puede estar afectando a las lecturas (Foto adjunta), o como normalizarla???
o ya pensar en otro sensor para esta operacion?
Muchas Gracias!! y quedo atento a cualquier aporte!!
CODIGO:
Les comento que estoy trabajando con un una placa ArduinoUNO (Sin Clock) y una placa YL-70 con 4und de sensores IR YL-73, el problema es que codifique la operacion y funciona correctamente pero de mañana esta placa aparece con todos los sensores activos, y ya de tarde-noche vuelve a operar correctamente, esto esta instalado en interior, no con exposicion directa a sol ni nada.
Me gustaria saber que puede estar afectando a las lecturas (Foto adjunta), o como normalizarla???
o ya pensar en otro sensor para esta operacion?
Muchas Gracias!! y quedo atento a cualquier aporte!!
CODIGO:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
void carro_luz(){
int C = digitalRead(Alt_carro); // Nomenclatura en base a plano carro
int D = digitalRead(Piso_carro);
int A = digitalRead(Alt_plantaHi);
int B = digitalRead(Alt_plantaLow);
unsigned long currentTime2 = millis();
if(currentTime2 - previousTime2 >= TmuestraCarro)
{if(A == HIGH && B == LOW && C == HIGH && D == HIGH) // Secuencia control caro y condiciones de ideal-error
{digitalWrite(Motor_subir,HIGH);
digitalWrite(Motor_bajar,HIGH);
}else if(C == LOW && D == LOW)
{Serial.println();
Serial.println("Error Carro Aplastado");
digitalWrite(Motor_subir,HIGH);
}else if(A == LOW && B == HIGH)
{Serial.println();
Serial.println("Error Lectura de Planta");
}else if(A == HIGH && B == HIGH && C == HIGH && D == LOW)
{Serial.println();
Serial.println("Sin Macetero");
digitalWrite(Motor_subir,HIGH);
digitalWrite(Motor_bajar,HIGH);
}else if(A == HIGH && D == HIGH && B == LOW && C == LOW)
{Serial.println();
Serial.println("Altura Cosecha Alcanzada");
digitalWrite(Motor_subir,HIGH);
}else if(D == HIGH && A == LOW && B == LOW && C == LOW)
{Serial.println();
Serial.println("ALTURA CRITICA!!");
digitalWrite(Motor_subir,HIGH);
}else if(A == LOW && B == LOW && C == HIGH && D == HIGH) // Subir Carro
{Serial.println();
Serial.println("Subiendo Carro");
digitalWrite(Motor_subir,LOW);
}else if(A == HIGH && B == HIGH && C == HIGH && D == HIGH) // Bajar Carro
{Serial.println();
Serial.println("Bajando Carro");
digitalWrite(Motor_bajar,LOW);
} // digitalWrite(Motor_subir,HIGH); previousTime2 = currentTime2; }}Valora esta pregunta

0