Ayuda con el sig. error "NotImplementedError: invalid type in assignment"
Publicado por Sergio (6 intervenciones) el 30/10/2013 16:38:27
Que tal,
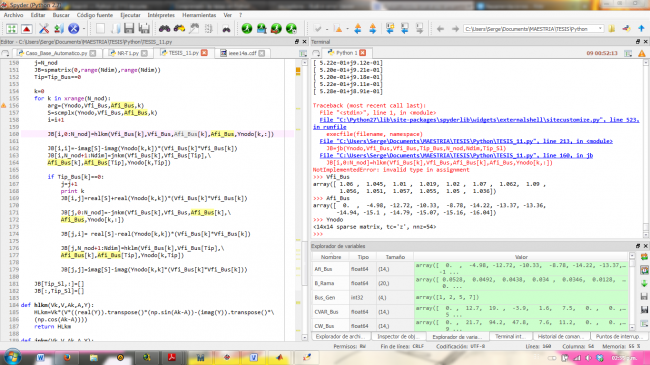
tratando de reescribir un código de Matlab a Python me topé con este error que no me ha dejado avanzar en un rato. El código realiza una corrida de flujos en sistemas eléctricos de potencia, preimero lee datos obtiene información de los datos leidos y depués los utiliza para realizar la corrida de flujos. Sin embargo, ya para la parte final aparece el error "NotImplementedError: invalid type in assignment" qu la verdad no he podido saber a que se deba. El código es el siguiente (aún no muestra resultados al usuario, sólo realiza la corrida de flujos):
El error aparece en la línea 160 que sería esta:
La verdad no tengo mucha experiencia en Python, así que pido su ayuda para poder hacer funcionar el código.Saludos y Gracias.
tratando de reescribir un código de Matlab a Python me topé con este error que no me ha dejado avanzar en un rato. El código realiza una corrida de flujos en sistemas eléctricos de potencia, preimero lee datos obtiene información de los datos leidos y depués los utiliza para realizar la corrida de flujos. Sin embargo, ya para la parte final aparece el error "NotImplementedError: invalid type in assignment" qu la verdad no he podido saber a que se deba. El código es el siguiente (aún no muestra resultados al usuario, sólo realiza la corrida de flujos):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
"""
Created on Tue Oct 01 12:23:13 2013
@author: Serge
"""
from numpy import *from math import *from pylab import *from cvxopt import *from time import time
from sys import argv
Num_Bus=[];Tip_Bus=[];Vfi_Bus=[]; Afi_Bus=[];
CW_Bus=[];CVAR_Bus=[];GW_Bus=[];GVAR_Bus=[];
P_Rama=[];Q_Rama=[];R_Rama=[];X_Rama=[];
B_Rama=[];ITEMS=[];T_Rama=[];Tap_Tr=[]
tic=time()
#------------------Abriendo el archivo del caso de estudio
archivo=open('ieee14a.cdf','r')
#------------------Leyendo la potencia base del sistema
Pot_base=archivo.readline()[30:37]
Pot_Base=float(Pot_base)
print 'Potencia Base del Sistema:\n', '\t',Pot_base
#------------------Leyendo el número de nodos del sistema
Numero_Nod=archivo.readline()
Numero_nod=Numero_Nod.find('ITEMS')
N_nod=Numero_Nod[Numero_nod-5:Numero_nod]
N_nod=int(N_nod)
print 'Numero de nodos del Sistema:\n','\t',N_nod
#-------------------leyendo datos de buses
for i in xrange(N_nod):
dato=archivo.readline()
Num_Bus.append(int(dato[0:4]))#Numero del bus
Tip_Bus.append(int(dato[24:26]))#Tipo del bus
Vfi_Bus.append(float(dato[27:33]))#Voltaje final del bus
Afi_Bus.append(float(dato[33:40]))#Angulo final del bus
CW_Bus.append(float(dato[40:49]))#Carga en MW del bus
CVAR_Bus.append(float(dato[49:59]))#Carga en MVAR del bus
GW_Bus.append(float(dato[59:67]))#Generacion en MW del bus
GVAR_Bus.append(float(dato[67:75]))#Generacion en MVAR del bus
#---------------------Leyendo numero de ramas
dato2=archivo.readline()
N_ram=archivo.readline()
Numero_ram=N_ram.find('ITEMS')
N_Ram=N_ram[Numero_ram-5:Numero_ram]
N_Ram=int(N_Ram)
print 'Numero de ramas del Sistema:\n','\t',N_Ram
#----------------------Formando arreglos de los datos leidos
Num_Bus=array(Num_Bus);Tip_Bus=array(Tip_Bus);Vfi_Bus=array(Vfi_Bus)
Afi_Bus=array(Afi_Bus);CW_Bus=array(CW_Bus);CVAR_Bus=array(CVAR_Bus)
GW_Bus=array(GW_Bus);GVAR_Bus=array(GVAR_Bus)
#----------------------Obteniendo tipos de buses
#Bus tipo Carga
Tip_Carga=find(Tip_Bus==0)
#Tip_Carga=array(Tip_Carga)
print 'Numero de buses tipo carga',Tip_Carga+1
#Bus tipo PV
Tip_PV= find (Tip_Bus==2)
print 'Numero de buses tipo PV',Tip_PV+1
#Bus tipo slack
Tip_Sl=find(Tip_Bus==3)
#Buses con Geneadores
Bus_Gen=find(Tip_Bus==2)
a=len(Bus_Gen)
NewGen=range(0,a)
Ndim=N_nod+len(Tip_Carga)
#------------------------Leyendo datos de ramas
for i in xrange(N_Ram):
dato3=archivo.readline()
P_Rama.append(int(dato3[0:4]))#Bus inicial
Q_Rama.append(int(dato3[5:9]))#Bus final
R_Rama.append(float(dato3[19:29]))#Resistencia de la rama
X_Rama.append(float(dato3[29:40]))#Reactancia de la rama
B_Rama.append(float(dato3[40:50]))#Susceptancia de la rama
T_Rama.append(int(dato3[18:19]))#Tipo de rama
Tap_Tr.append(float(dato3[76:82]))#Tap del transformador
#print B_Rama
archivo.close()
P_Rama=array(P_Rama); Q_Rama=array(Q_Rama);R_Rama=array(R_Rama);
X_Rama=array(X_Rama);B_Rama=array(B_Rama);T_Rama=array(T_Rama);
Tap_Tr=array(Tap_Tr);
#-------------------------Formando Ynodo
#Indices de lados p y q
pl=find(T_Rama!=1)
pt=find(T_Rama==1)
#Nodos p y q
PL=P_Rama[pl]
PT=P_Rama[pt]
QL=Q_Rama[pl]
QT=Q_Rama[pt]
#Admitancia de la rama
Ylin=1/(R_Rama[pl]+X_Rama[pl]*1j)
Ytr=(1/(R_Rama[pt]+X_Rama[pt]*1j))/Tap_Tr[pt]
#Datos para spmatrix
PQ=concatenate((PL,PT,QL,QT))-1; #Indices pq
QP=concatenate((QL,QT,PL,PT))-1; #Indices qp
Y1=concatenate((Ylin,Ytr,Ylin,Ytr)) #Admitancia propia
Y2=-concatenate((Ylin+B_Rama[pl]/2,Ytr/Tap_Tr[pt],\
Ylin+B_Rama[pl]/2,Ytr*Tap_Tr[pt])) #Admitancia mutua
Ynodo=spmatrix(Y1,PQ,PQ,size=(N_nod,N_nod),tc='z')
Ynodo=Ynodo+spmatrix(Y2,PQ,QP,size=(N_nod,N_nod),tc='z')
print Ynodo[2,:]
it=0Viol=0KPQ=1Tolv=0.001
#Definiendo funciones necesarias para el proceso
def scmplx(*arg):
nargin=len(arg)
print 'Numero de argumentos de entrada:',nargin,'\n\n'
Vfasor=arg[1]*(np.cos(arg[2])+np.sin(arg[2])*1j)
Vfasor=matrix(Vfasor)
print 'Vfasor es:\n',Vfasor
if nargin==4:
scal=Vfasor[arg[3]]*((arg[0][arg[3],:]*Vfasor))
else:scal=Vfasor*(conjugate(arg[0]*Vfasor))
return scal
def jb(Ynodo,Vfi_Bus,Afi_Bus,Tip_Bus,N_nodo,Ndim,Tip_Sl):
i=-1
j=N_nodJB=spmatrix(0,range(Ndim),range(Ndim))
Tip=Tip_Bus==0
k=0for k in xrange(N_nod):
arg=(Ynodo,Vfi_Bus,Afi_Bus,k)
S=scmplx(Ynodo,Vfi_Bus,Afi_Bus,k)
i=i+1
JB[i,0:N_nod]=hlkm(Vfi_Bus[k],Vfi_Bus,Afi_Bus[k],Afi_Bus,Ynodo[k,:])
JB[i,i]=-imag[S]-imag(Ynodo[k,k])*(Vfi_Bus[k]*Vfi_Bus[k])
JB[i,N_nod+1:Ndim]=jnkm(Vfi_Bus[k],Vfi_Bus[Tip],\
Afi_Bus[k],Afi_Bus[Tip],Ynodo[k,Tip])
if Tip_Bus[k]==0:
j=j+1
print k
JB[i,j]=real[S]+real(Ynodo[k,k])*(Vfi_Bus[k]*Vfi_Bus[k])
JB[j,0:N_nod]=-jnkm(Vfi_Bus[k],Vfi_Bus,Afi_Bus[k],\
Afi_Bus,Ynodo[k,:])
JB[j,i]= real[S]-real(Ynodo[k,k])*(Vfi_Bus[k]*Vfi_Bus[k])
JB[j,N_nod+1:Ndim]=hklm(Vfi_Bus[k],Vfi_Bus[Tip],\
Afi_Bus[k],Afi_Bus[Tip],Ynodo[k,Tip])
JB[j,j]=imag[S]-imag(Ynodo[k,k]*(Vfi_Bus[k]*Vfi_Bus[k]))
JB[Tip_Sl,:]=[]
JB[:,Tip_Sl]=[]
def hlkm(Vk,V,Ak,A,Y):
HLkm=Vk*(V*((real(Y)).transpose()*(np.sin(Ak-A))-(imag(Y)).transpose()*\
(np.cos(Ak-A))))
return HLkm
def jnkm(Vk,V,Ak,A,Y):
JNkm=Vk*(V*((real(Y)).transpose()*(np.cos(Ak-A))+(imag(Y)).transpose()*\
(np.sin(Ak-A))))
return JNkm
#Lazo iterativo de cálculo
while KPQ==1 and it<=60:
arg=(Ynodo,Vfi_Bus,Afi_Bus)
S=scmplx(Ynodo,Vfi_Bus,Afi_Bus)
S=S.flatten()
DelP=CW_Bus[Tip_PV]-real(S[Tip_PV])
DelQ=CVAR_Bus-imag(S)
Delq=DelQ[Tip_Carga]
Qgen=-DelQ[Tip_PV[NewGen]]*Pot_Base
Pmismatch=hstack((DelP,Delq))
if KPQ == 1:
Delq=DelQ[Tip_PV]
Pmismatch=vstack((DelP,Delq))
#Se calcula el Jacobiano
JB=jb(Ynodo,Vfi_Bus,Vfi_Bus,Tip_Bus,N_nod,Ndim,Tip_Sl)
#Se resuelven ángulos y voltajes
DeltaX=solve(JB,Pmismatch)
#Se actualizan ángulos y voltajes
Vfi_Bus[Tip_PV]=Vfi_Bus[Tip_PV]+DeltaX[range(N_nodo,Ndim-1)]\
*Vfi_Bus[Tip_PV]
Afi_Bus[Tip_Carga]=Afi_Bus[Tip_Carga]+DeltaX[range(0,N_nod-1)]
it=it+1
toc=time()
print toc-ticEl error aparece en la línea 160 que sería esta:
1
JB[i,0:N_nod]=hlkm(Vfi_Bus[k],Vfi_Bus,Afi_Bus[k],Afi_Bus,Ynodo[k,:])
La verdad no tengo mucha experiencia en Python, así que pido su ayuda para poder hacer funcionar el código.Saludos y Gracias.
Valora esta pregunta

0